Навигация мобильных роботов
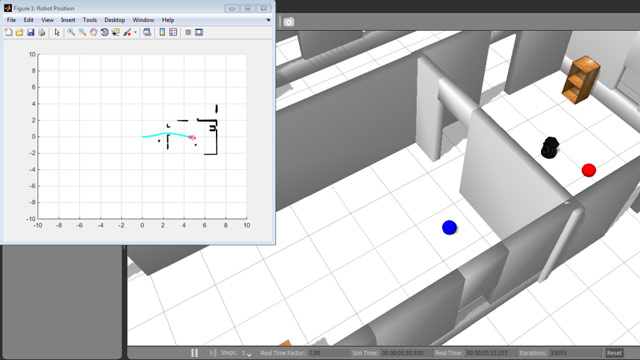
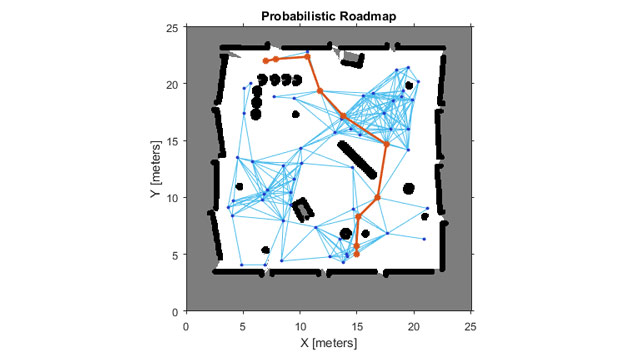
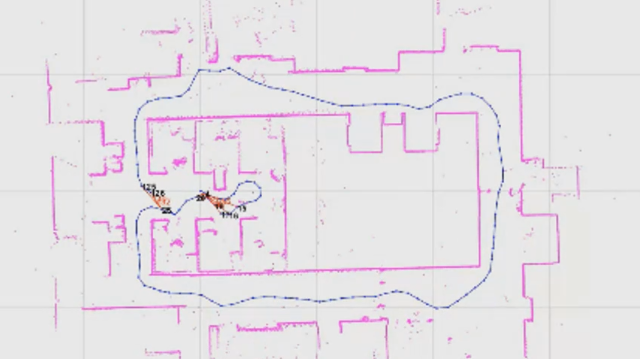
Покажем, что в MATLAB уже реализованы все необходимые инструменты для построения карт в неизвестном пространстве с одновременным контролем текущего положения (SLAM).
Будут разобраны основные инструменты и методы моделирования роботов и разработки алгоритмов, которые позволяют существенно упростить и ускорить разработку. Вы узнаете, какие алгоритмы навигации мобильных роботов есть в MATLAB и как вы можете их использовать и улучшать.
Вебинар будет полезен для разработчиков автономных роботов и специалистов по системам автоматического управления.
 |  |  |
Сферы применения: Системы управления
Выберите компанию из списка
Новый email