Системы автоматического управления
Инженеры по системам управления используют MATLAB® и Simulink® на всех этапах разработки — от моделирования объекта управления до разработки и настройки алгоритмов и логики диспетчеризации, вплоть до развертывания на аппаратной платформе с помощью автоматической генерации кода, а также верификации, валидации и тестирования системы. MATLAB и Simulink предлагают:
- Графическую среду для моделирования динамики объекта управления, разработки алгоритмов управления и их запуска в замкнутом контуре.
- Моделирование объекта управления методами идентификации или инструментами физического моделирования
- Встроенные функции и инструменты для анализа перерегулирования, времени нарастания, запасов по амплитуде и фазе и других характеристик качества управления во временной и частотной областях
- Корневой годограф, ЛАФЧХ (диаграммы Боде), LQR, LQG, робастное управление, управление с прогнозирующими моделями и другие инструменты для разработки и анализа
- Автоматическую настройку ПИД, настройку программируемого усиления и произвольных SISO- и MIMO-систем управления
- Моделирование, разработку и симуляцию логики диспетчерского управления для планирования, переключения режимов, обнаружения изоляции и снятия отказов
Моделируйте и симулируйте динамику объекта управления
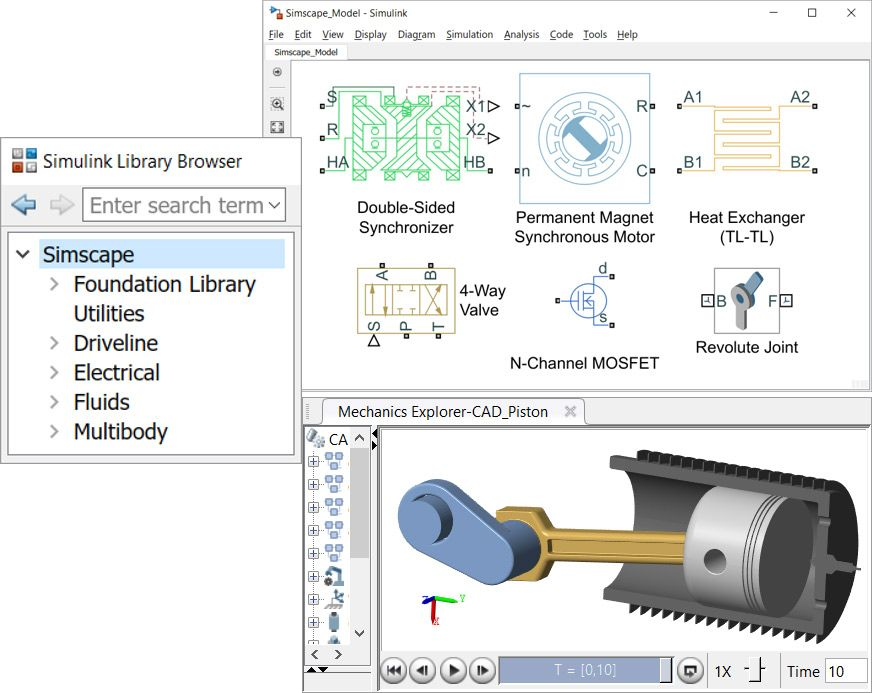
Используйте MATLAB и Simulink для создания достоверных моделей физических объектов. Создайте полную системную модель вашего агрегата, описывая сложную динамику компонентов с помощью различных методов моделирования. Для описания каждого устройства выбирайте наиболее подходящий метод.
Определяйте динамические характеристики устройства по экспериментальным данным типа “вход-выход” с помощью методов идентификации, если структура устройства неизвестна. Создавайте модели объектов различной физической природы с помощью инструментов физического моделирования без необходимости описания физики уравнениями . Используйте готовые блоки механических, электрических, магнитных, гидравлических, пневматических и тепловых компонентов, чтобы собрать модель физики вашей системы.
Разработайте и настройте контроллеры для систем с обратной связью
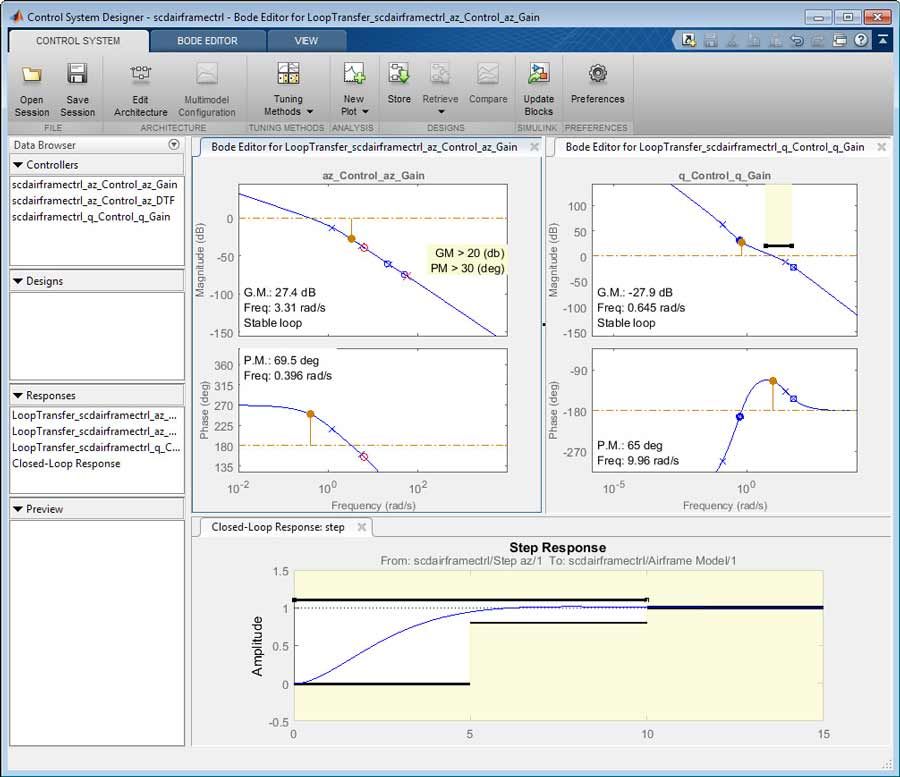
Разрабатывайте контроллеры и анализируйте их поведение в замкнутом контуре, оценивайте показатели качества управления, такие как перерегулирование, время нарастания и запасы устойчивости. Триммируйте и линеаризуйте нелинейные модели Simulink. Анализируйте влияние разброса параметров на характеристики и устойчивость ваших моделей.
Используйте ЛАФЧХ, корневой годограф и другие методы проектирования САУ, автоматически настраивайте ПИД-регуляторы в процессе расчета модели или работы алгоритма на плате управления. Готовые инструменты позволяют автоматически настраивать многоконтурные многопараметрические САУ и использовать продвинутые стратегии управления, например, управление с прогнозирующими моделями, робастное управление и другие. Используйте методы оптимизации, чтобы подобрать коэффициент усиления контроллера для обеспечения требований по величине перерегулирования времени нарастания.
Разрабатывайте и тестируйте алгоритмы планирования и принятия решений
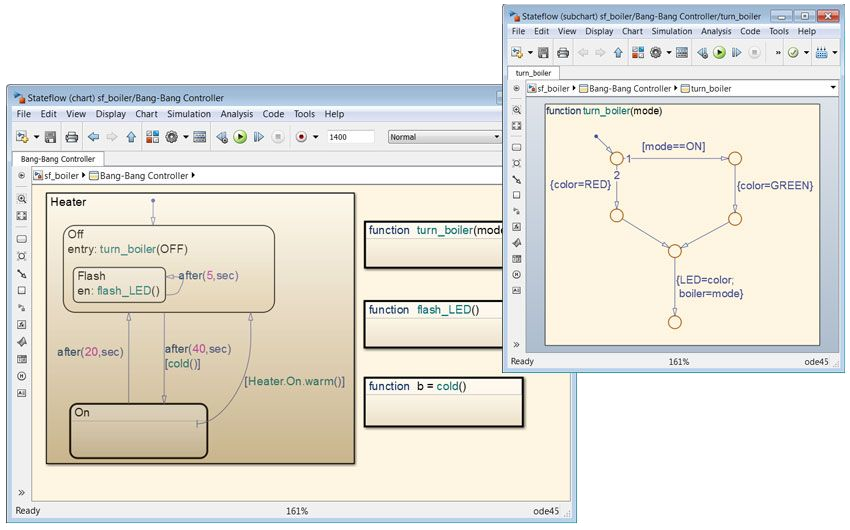
Используйте Stateflow ® для моделирования, разработки и имитации логики диспетчеризации в вашей системе управления, которая планирует работу контроллера, управляет рабочим режимом системы и выполняет обнаружение отказов, изоляцию и реконфигурацию.
Используйте графический редактор для построения алгоритма управления в виде конечного автомата или блок-схемы. Комбинируйте графическое и табличное описания алгоритмов для моделирования реакции вашей системы на события, условия по времени и входные сигналы. Вы можете для этого использовать диаграммы состояний, блок-схемы, таблицы состояний и таблицы истинности. С помощью встроенной анимации визуализируйте поведение системы в процессе работы модели, чтобы подсветить активные состояния и переходы.
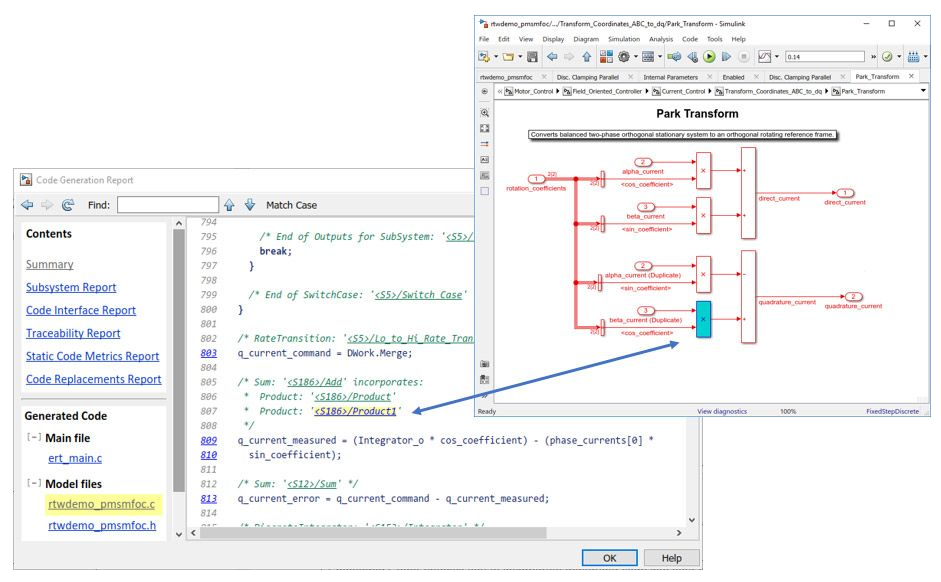
Развертывание алгоритмов на встраиваемых контроллерах
После того как вы разработали алгоритмы САУ, вы можете уточнить их для развертывания на железе. Вы можете преобразовать типы данных под вычисления в фиксированной точке. После верификации алгоритмов в замкнутом контуре в процессе симуляции разверните их на микроконтроллерах, ПЛК и ПЛИС, автоматически сгенерировав код C, структурированный текст или HDL-код.
Вы можете настроить процессы непрерывного тестирования и верификации системы управления. Проведите HIL-тестирование, запустив алгоритм управления на микроконтроллере, а модель объекта на машине реального времени, подключенной к контроллеру. Вы также можете верифицировать и тестировать свою систему управления, используя формальные методы верификации.