Система «Видеодетектор огня»

Целью данной системы является распознавание области открытого пламени на видеоизображении (в видимом диапазоне длин волн) и передача координат области огня совместно с тревожным сообщением на пульт дежурного или на систему аварийного пожаротушения.
Назначение

Системы безопасности, оборонная промышленность, автоматические системы пожаротушения, пожарные роботы, системы обнаружения возгорания на открытых площадках, нефтяные терминалы, ангары для самолётов.
Видеодемонстрация работы системы
 Видеодетектор огня на основе глубокого обучения
Видеодетектор огня на основе глубокого обученияПараметры системы
- Время детектирования пламени 10 секунд, камера закреплена стационарно;
- Минимальная область пламени 15х30 пикселей;
- Устойчивость к ложным сигналам «проблесковые маячки»;
- Работа с несжатым видео, анализ каждого кадра 25 кадров/сек;
- Поддерживаемые разрешения от 576х720 до 1080х1920 пикселей;
- Поддержка видеокамер стандарта PAL, SDI, HDMI;
- Аппаратная платформа ПЛИС Intel (Altera);
- Габариты устройства 15х20х5 см, питание 12 вольт.
Принцип работы

Видеодетектор огня базируется на анализе изображения, получаемого с видеокамеры, работающей в видимом диапазоне длин волн и передающей на вход системы цветное RGB-изображение. Первая стадия обработки основана на анализе цветовых и яркостных характеристиках пламени. На изображение накладывается яркостная маска, и выявляются потенциальные области огня (рисунок 3).
Однако одного яркостного признака недостаточно для корректного распознавания пламени на изображении, существует множество объектов схожих по яркости и цвету. Главное отличие — это характер движения объектов. Следующий шаг обработки основан на анализе динамических характеристик. В потенциальных областях огня оценивается динамика изменения сцены. Для пламени характерно высокое изменение интенсивности на своей границе. При наличии дыма на изображении уменьшается его контрастность и детализация, применение вейвлет-анализа позволяет оценить низкочастотные и высокочастотные компоненты изображения, тем самым выявить области задымления на видеоизображении.
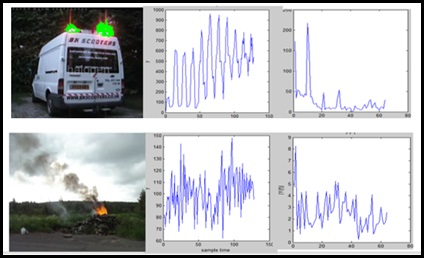
Рис. 4. Анализ Спектра сигналов пламени и проблескового маячка
Для повышения надежности системы применяется спектральный анализ и из рассмотрения исключаются все ложные периодические сигналы, например, «проблесковые маячки» (рисунок 4).
При разработке устройства использовался модельно-ориентированный подход. На первом этапе была разработана программная модель системы распознавания огня в Simulink рисунок 5. Это позволило кратчайшие сроки разработать и протестировать алгоритмы на тестовых видео. На следующем этапе разработанные алгоритмы были перенесены на выбранную аппаратную платформу Аltera Cyclone V GX (рисунок 2).
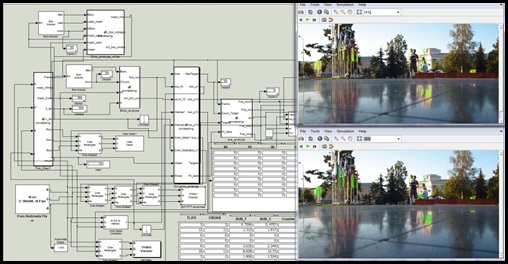
Рис. 5. Программная модель «Видеодетектора огня» в Simulink
Разработанные алгоритмы при необходимости можно адаптировать и под другие целевые платформы CPU, GPU, SoC. По требованию заказчика система может быть выполнена в взрывозащитном исполнении, или изготовлена под определенные размеры корпуса. В рамках консалтинга возможно расширение функционала системы, разработка видеодетектора дыма и добавление ИК-датчика.

