Новые технологии от Экспоненты на «Микроэлектронике 2024»
Инженеры Экспоненты представили на форуме «Микроэлектроника 2024» уникальный имитатор фоно-целевой обстановки (ФЦО) морской подстилающей поверхности на основе комплекса полунатурного моделирования КПМ РИТМ и моделей Engee. Имитатор позволит кратно улучшить обнаружение низколетящих целей при штиле и шторах и оценить производительность как радарных, так и радиотехнических систем в целом.
Традиционно для обнаружения и отслеживания целей необходимо провести обширную серию полевых испытаний. Кроме того, для охвата различных условий распространения радиоволн, помехового воздействия, погодных условий и особенность рельефа местности требуется несколько испытательных площадок. И даже в этом случае результаты испытаний применимы только к определенному и ограниченному набору условий. Получается, что полевые испытания не обладают универсальностью и повторяемостью. Поэтому трудно оценить способность радара в условиях радиоэлектронного противодействия.
Для решения этой задачи поможет имитатор ФЦО с моделью распространения радиоволн над морской поверхностью, реализованной в российской среде вычислений Engee и в Симулинк.
Модель включает в себя особенности состояния моря и эффективно рассчитывает распространение радиоволн, базируясь на численном решении волнового параболического уравнения. Также в этой модели учтены сложные условия – неожиданные эффекты, которые возникают при распространении радиоволн над морем. Особенность модели в том, что она имеет модульную структуру и может быть адаптирована под разнообразный ландшафт местности. Также модульная структура позволяет варьировать области применения – это связь, навигация, радиолокация.
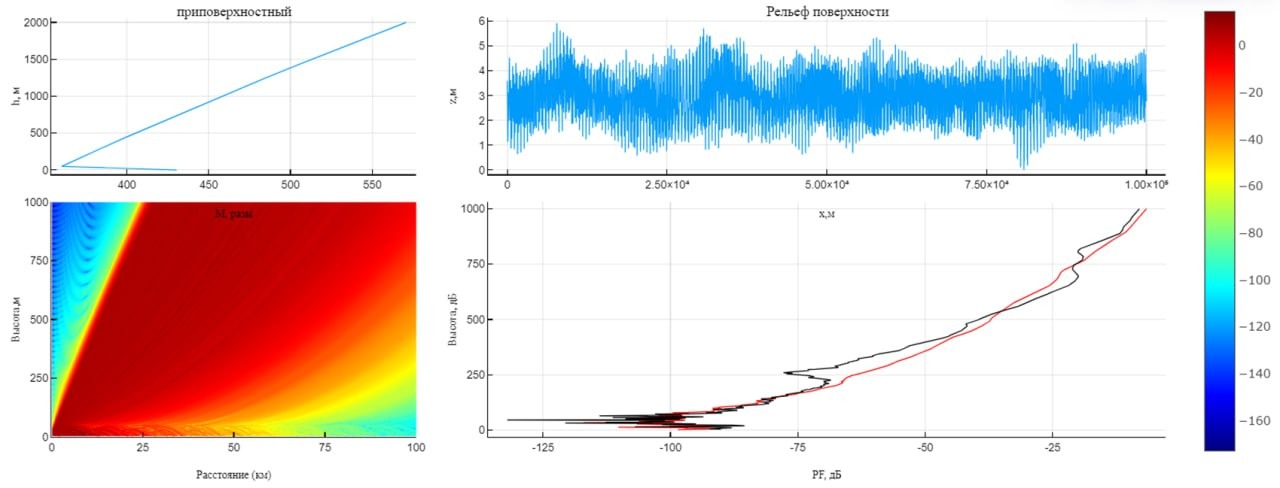
Сценарий использования имитатора предполагает загрузку траектория движения цели (изменение высоты полета). Цель характеризуется значением эффективной площади рассеяния и скоростью. В качестве подстилающей поверхности выступает море, где учитывается балльность, соленость, температура и многие другие факторы. Геометрические особенности моря рассчитываются по разработанному алгоритму, базирующемуся на совместном использовании GIT-модели и спектра Эльфохейли.
Цель, перемещаясь в пространстве, попадает в зоны, где фактор распространения минимален, что сказывается на обнаружении объекта. Картина распространения радиоволн имитируется за счет решения уравнения Гельмгольца с помощью численного решения параболического волнового уравнения. В качестве зондирующего сигнала выступает модельный ЛЧМ сигнала, сформированный на КПМ РИТМ.
Сценарии применения имитатора:
моделирование распространения радиоволн (РРВ) с возможностью подключения приёмо-передающих модулей (ППМ) или контрольно-измерительного оборудования;
симуляция динамических сценариев движения множественных целей над различными типами подстилающих поверхностей (водная гладь со всеми ее нюансами – рябь, волны и т.д., лес, состоящий из различных деревьев, поле с учетом особенностей ландшафта, город) для задач радиолокации;
моделирование взаимного расположения ППМ в условиях сложной помеховой обстановки для задач беспроводной связи и радионавигации.
Это потенциальный российский аналог хорошо известного оборудования от Rohde&Schwarz. С уходом зарубежных производителей в этом сегменте появился большой пробел, и представители коммерческих организаций хотят видеть аналогичное отечественное оборудование. Интерес представляет не только заявленная нами функциональность по имитации распространения сигналов над морской поверхностью, но и возможность моделировать другие типы подстилающей поверхности, такие как поле и лес с учетом ландшафтных особенностей. Данное решение уже вызвало большой интерес со стороны разработчиков радиотехнических изделий и комплексов. В дальнейшем добавим в комплекс сигналы на промежуточной частоте, что позволит приблизиться к отладке и тестированию реальных радиотехнических узлов.
Также инженер отдела, к.т.н. Дмитрий Балакин представил на форуме технологию, позволяющую отличить птицу от беспилотника и имитировать это с помощью программно-аппаратного имитатора фоно-целевой обстановки на основе КПМ РИТМ, радиотехнических алгоритмов и моделей Engee. Команда по радиолокации и ЦОС Экспоненты продвигает нейросетевой подход по обнаружению и классификации БПЛА. Нехватку данных мы компенсируем за счет генерации синтетических данных модельного подхода. При моделировании откликов БПЛА учитываются конструктивные особенности конкретного типа беспилотника (количество и геометрия расположения лопастей, скорость вращения, траектория полета и др.).
Нейросеть может принять птицу за БПЛА из-за схожести значений эффективной площади рассеяния (ЭПР). Чтобы избежать этой ошибки, модель учитывает размеры крыльев и тела птицы, а также их маховые движения. В разные моменты времени положение крыльев можно рассмотреть как уголковый отражатель, меняющий свои конструктивные размеры в зависимости от фазы полета. Полученные отклики мы преобразуем в вид для обучения нейронной сети. Дальнейшее развитие алгоритмов детекции и классификации предполагает замешивание с реальными сигналами и реализации нейронной сети на заданном вычислителе.
Особый интерес у слушателей вызвали доклады по разработке российской среды моделирования Engee и ее применению в разработке радиотехнических систем. Все участники форума признают, что будущее российских радиотехнических систем напрямую зависит от того сможет ли отрасль импортозаместить зарубежные среды моделирования, например такие как MATLAB & Simulink, ставшие де-факто промышленным стандартом при решении многих задач. Слушатели форума оценили широкий спектр возможностей Engee для разработки моделей сложных технических систем и выполнения технических вычислений на стыке радиолокации и искусственного интеллекта.
Академический сектор также активно принимал участие в дискуссиях. Особенно приятно было услышать опыт представителей МИЭТ из числа слушателей доклада начальника отдела радиотехнических систем Марата Усса о положительном внедрении среды Engee в учебный процесс по радиотехническим дисциплинам.

