Технологии моделирования при создании радиолокационных систем
Проектирование современных радиолокационных систем военного назначения – непростая задача. Но применение новейших средств и методик моделирования позволяет разрешить многие трудности процесса разработки.
HONGLEI CHEN, SOFTWARE ENGINEER, RICK GENTILE, PRODUCT MANAGER MATHWORKS
Разработка радарных систем – сложная, мульти-доменная задача. С распространением технологии фазированных антенных решёток (ФАР) инженерам стали доступны новые возможности, такие как электронное управление лучом и пространственная обработка сигналов. Но новые возможности повлекли за собой усложнение систем в целом. К тому же, увеличение количества источников помех, «заполнение» радиочастотного спектра их излучением, вкупе с постоянно уменьшающейся эффективной поверхностью рассеяния (ЭПР) целей, создают новые трудности при достижении необходимых показателей эффективности радиолокационных систем.
Удобная среда динамической симуляции может стать решающим фактором в оптимизации процесса разработки РЛС и позволить снизить риски, неизбежно возникающие при проектировании сложных систем, работающих в сложных условиях. Моделирование мульти-доменных радарных систем поможет принять правильные решения в процессе разработки, а также позволит обнаружить ошибки проекта на самых ранних стадиях. К примеру, на модели можно оценить способность радара обнаруживать цели с малыми ЭПР, либо отработать алгоритмы обработки сигналов в условиях шумов и помех. На поздних этапах те же самые модели могут быть использованы для доказательства необходимости модификации существующей системы и подтверждения пользы от такой модификации до закупки или изготовления каких-либо дополнительных узлов. Помимо этого, на модели можно прогнозировать поведение системы в случае отказа одного или нескольких компонентов.
От зондирующих импульсов до обнаружений
Попробуем осветить несколько аспектов того, каким образом модель может помочь с оценкой параметров системы. На Рисунке 1 представлена мульти-доменная системная модель, созданная в Simulink. В модели присутствуют блоки радарной системы, ответственные за генерацию, приём, передачу и пространственную обработку сигналов. Математические описания целей и среды распространения также включены в состав системной модели.

Рисунок 1. Мульти-доменная модель РЛС.
Это модель радара X-диапазона, позволяющего обнаруживать цели с малыми значениями ЭПР (<0.5 м2). Требуемая дальность в данном примере – 35 км с разрешением по дальности 5 метров. Каждый из блоков, показанных на Рис. 1, может быть с лёгкостью описан на языке MATLAB или настроен в соответствии с выбранной конфигурацией системы. Например, такие параметры, как тип сигнала, требуемая мощность передатчика или коэффициент усиления антенны могут быть явно установлены в каждом из блоков.
Разработка зондирующих импульсов
Как только мы определили параметры разрешения по дальности и по скорости, а также минимальную и максимальную дальность покрытия нашего радара, мы можем интерактивно подобрать параметры модулирующего импульса, соответствующего требованиям системы. На Рисунке 2 показана конфигурация параметров зондирующего импульса, устанавливаемых интерактивно. Полученные "характеристики сигнала" выделены рамкой, и мы можем убедиться в том, что они удовлетворяют требованиям системы. Рисунок 3 отображает характеристику соответствующего согласованного фильтра.

Рисунок 2. Модулирующий импульс.

Рисунок 3. Соответствующий согласованный фильтр.
Для подобных радарных систем мы стараемся минимизировать мощность передатчика, а значит и снизить стоимость. Несмотря на ограничение по мощности перед нами стоит задача обнаруживать цели с малыми ЭПР. Достичь этого можно используя в системе антенные решётки с большим коэффициентом усиления.
Разработка антенных решёток
Мы можем интерактивно спроектировать и проанализировать параметры решётки, включая геометрию, расстояние между элементами, взаимное расположение элементов и весовые функции. Пример показан на Рисунке 4 – прямоугольная решётка из 36x36 равноудалённых элементов. Луч, генерируемый подобными решётками, может отклоняться как по азимуту, так и по углу места. На Рисунке 5 показана диаграмма направленности разработанной антенны. Решётка таких размеров для радаров Х-диапазона может быть с лёгкостью установлена на множество платформ, в том числе подвижных.

Рисунок 4. Равномерная прямоугольная антенная решётка 36x36 элементов.

Рисунок 5. Диаграмма направленности антенной решётки в 2D и 3D.
Разработанную антенную решётку мы можем использовать непосредственно в системной модели. За счёт большого количества элементов мы получили направленность антенны в 34.73 дБи, что позволило сохранить пиковую мощность в пределах 20 Вт. Для подавления уровня боковых лепестков было применено взвешивание Тейлора. Если в модели потребуется более точное описание подобной антенны, то мы можем воспользоваться функционалом электромагнитного решателя в составе Antenna Toolbox, рассчитать конкретный антенный элемент, интегрировать его в решётку и смоделировать взаимное влияние элементов друг на друга. Эти возможности позволяют нам с лёгкостью оценить влияние антенны на работу системы, и решить на ранних этапах, нужно ли вносить изменения на системном уровне или уточнять требования к дальнейшим цепям обработки.
Анализ "что если"
Прежде чем перейти к рассмотрению других узлов радарной системы, стоит отметить пользу нашей модели при так называемом анализе «что если». Подобный анализ во многом направлен на поиск компромиссных решений при разработке системы, работающей в разнообразных внешних условиях, а также на влияние выхода из строя отдельных компонентов на показатели системы. К примеру, мы можем автоматически подобрать лучший вариант прореженного массива для выбранной решётки. Либо, как показано на Рисунках 6 и 7, можно оценить влияние дефективных элементов на диаграмму направленности антенны. Это важно для определения циклов обслуживания: для РЛС, на которых нет постоянного обслуживающего персонала, диагностика и ремонт осуществляется выездными бригадами по штатному расписанию. Соответственно, важно оценить работоспособность системы при некотором допустимом количестве вышедших из строя элементов. Диаграмма направленности на Рисунке 7 показана для случая отказа 15% антенных элементов.

Рисунок 6. Решетка 36x36 с дефективными элементами.

Рисунок 7. Искажение диаграммы направленности.
Подобный анализ может так же быть осуществлён на уровне подмассивов. На Рисунке 8 показан пример построения решётки из 6х6 подмассивов. Результирующая ДН показана для случая выхода из строя 10 из 36 подмассивов.

Рисунок 8. Вид диаграммы направленности решётки, собранной из 36 подмассивов 6х6, в случае выхода из строя 10 из них.
Моделирование внешней среды
Теперь поговорим о моделировании и динамической симуляции внешней среды. В нашем примере мы создаём цели различной сложности, включая цели с флуктуирующей ЭПР и зависимостью ЭПР от угла и частоты. Мы также можем задавать закон движения этих целей. Помимо этого, модель учитывает эффекты распространения сигнала в условиях осадков (дождь, туман, газ) и замирания канала. Для воссоздания сложной электромагнитной обстановки и отработки техник подавления помех можно использовать модели источников излучения.
В нашей модели мы используем цели со значениями ЭПР 0.05 м2. Этот сценарий особо актуален сейчас, принимая во внимание распространение дронов и БПЛА.
Точность системной модели в области СВЧ тракта также может быть повышена посредством использования продвинутых моделей РЧ-компонентов, таких как фазовращатели, смесители, усилители и т.д. Simulink служит отличной платформой для мульти-доменных симуляций, так как он предоставляет наборы тонко настраиваемых блоков и решателей для моделирования и симуляции динамических систем со смешанными сигналами. К тому же, полноценная интеграция с MATLAB позволяет использовать алгоритмы на языке MATLAB внутри моделей и экспортировать результаты симуляции обратно в MATLAB.
Формирование множественных лучей
В нашей подсистеме обработки сигналов мы формируем несколько лучей, направленных в разные области пространства. По тем же самым каналам мы оцениваем направление прибытия сигналов. Согласованный фильтр (Рис. 3) позволяет повысит отношение сигнал-шум и использовать более устойчивый порог обнаружения. В модель также добавлен блок усиления, зависящего от времени (time varying gain, TVG), и с его помощью можно использовать единый порог для отражений на всём диапазоне дальностей. Принятые отражённые импульсы накапливаются некогерентно. Комбинация этих техник позволяет обработанным импульсам на одном интервале интеграции сохранять требуемое отношение сигнал-шум. Результаты работы системы могут быть визуализированны различными способами, как показано на Рисунках 9 (Power vs. Time, Intensity vs. Time) и 10 (трёхмерное представление динамического сценария).
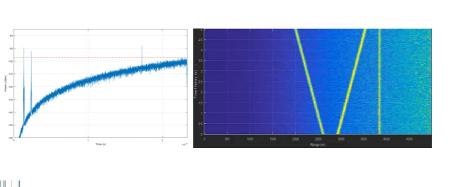
Рисунок 9. Визуализация обнаружения целей.

Рисунок 10. Сценарий обнаружения трёх целей с малыми ЭПР радаром X-диапазона.
Уровни отражённых импульсов от всех трёх целей находятся над порогом, и поэтому обнаруживаются. В данном примере цели имеют нефлуктуирующую ЭПР значением 0.5 м2 и расположены в зоне покрытия радара. Стоит отметить, что блоки в модели являются «масштабируемыми» - при соответствии входов и выходов, каждый блок может быть заменён пользовательским.
Оценка зоны покрытия нескольких радаров
Используя эту модель как отправную точку, мы можем проанализировать работу сети из нескольких радаров. На Рисунке 11 показана простая конфигурация с тремя радарными системами, расположенными таким образом, что их зоны покрытия перекрываются. Первые три диаграммы показывают отношение сигнал-шум в зоне покрытия каждого из радаров. Четвёртый график демонстрирует области в зонах покрытия, где отношение сигнал-шум не ниже 5 дБ – требование к системе с выбранными алгоритмами обработки сигналов и взаимным расположением радаров.

Рисунок 11. Визуализация отношения сигнал-шум для трёх радаров.
Сокращение трудозатрат при разработке
Моделирование радарных систем на ранних стадиях разработки позволяет сэкономить время и общую стоимость за счёт выявления проблем и возможных ошибок в самом начале проекта. Помимо этого, многие направления разработки можно будет утвердить при помощи анализа «что если», ещё до конструирования первых прототипов отдельных узлов. И такой анализ может быть применён ко всем компонентам системы, от антенных элементов до алгоритмов обнаружения.
Подобные модели могут быть использованы как для симуляции радарных систем при разработке алгоритмов ЦОС, так и для генерации входных воздействий для систем обработки информации. Полученные IQ-сигналы могут быть использованы в процессе отладки алгоритмов, и когда алгоритм считается отлаженным, синтезированные входные воздействия можно легко заменить записанными данными для любого «среза» системы.
Готовые компоненты радарной модели позволяют быстро собрать первое приближение системы, но в дальнейшем среда разработки позволяет дополнять и уточнять любую из частей проекта. Как демонстрирует описанный пример, процесс разработки радарных систем с использованием современных средств моделирования и симуляции может быть построен более эффективно, начиная от анализа требований и компромиссов разработки, до интеграции и тестирования всей мультидоменной системы.